
 EN
EN
 EN
EN ZH
ZH IT
IT ES
ES TH
TH TR
TR JA
JA PT
PT KO
KO RU
RU FR
FR DE
DE AR
AR
 Accueil > Centre de produits > Module de joint planétaire > Module de joint planétaire léger à faible charge LZ5710
Accueil > Centre de produits > Module de joint planétaire > Module de joint planétaire léger à faible charge LZ5710
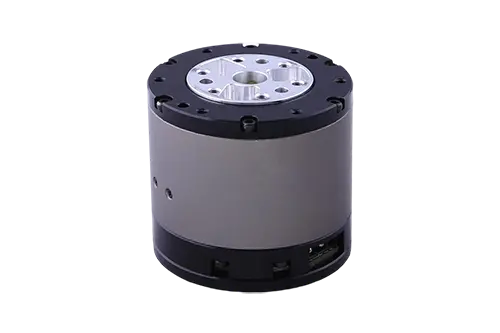
Module de joint planétaire léger à faible charge LZ5710
Poids : 1420 g ± 20 g
Nombre de pôles : 42 pôles
Nombre de phases : 3 phases
Méthode de conduite : FOC (Contrôle orienté sur le terrain)
Rapport de réduction : 10:1
Technologie FOC matérielle complète, développement FPGA au niveau des puces
Câblage creux
Contrôle triple boucle avec toutes les fréquences à 20 kHz pour une réponse rapide
etherCat/canOpen Bus
ADC 16 bits avec taux d'échantillonnage de 1 MHz
Frein de mise hors tension
La technologie de base du produit réside dans le module commun intégré harmonique, doté d'une conception intégrée de contrôle d'entraînement. La structure du rotor interne permet un câblage creux, tandis que les options de modèles diversifiées, notamment les séries 11, 14, 17, 20, 25, 32 et 40, garantissent des applications flexibles. Avec un profil compact et miniaturisé et une faible consommation d'énergie, il adopte un mécanisme de freinage de type broche qui déclenche instantanément le verrouillage mécanique en cas de perte de puissance, avec un temps d'action inférieur à 10 ms.
La conception à double roue en acier, intégrant des roulements à rouleaux croisés avec des roues en acier, réduit l'occupation de l'espace axial. En engrenant deux roues en acier avec une seule cannelure flexible, il atténue les contraintes liées à la déformation de la cannelure flexible, permettant ainsi un fonctionnement fluide, une efficacité élevée et une précision de positionnement allant jusqu'à 20 secondes d'arc.
Conception ultra-compacte et légère
Dimensions : Diamètre Ø57 mm × Hauteur 46 mm, pesant seulement 300 g : il s'agit d'un module de joint compact.
Structure non creuse, de conception plus simple et à moindre coût, adaptée aux joints d'extrémité qui ne nécessitent pas de câblage.
Solutions de transmission et de communication matures
Mode d'entraînement : contrôle orienté champ FOC, avec contrôle à triple boucle pour le couple, la vitesse et la position, idéal pour le contrôle des articulations de haute précision.
Communication : interface CAN/CAN FD, compatible avec les contrôleurs de robots grand public, câblage simple et forte capacité anti-interférence.
Configuration à double encodeur magnétique : encodeur magnétique + double encodeur, prenant en charge un double contrôle en boucle fermée du côté moteur et du côté sortie pour améliorer la précision du positionnement.
Fiabilité et adaptabilité environnementale
Plage de température : -20 ~ 60 °C, couvrant les conditions de fonctionnement typiques des environnements intérieurs aux environnements semi-extérieurs.
Bruit : ≤55 dB(A) ; conception à faible bruit, idéale pour les scénarios de collaboration homme-robot.
Classe d'isolation : classe B, garantissant une fiabilité opérationnelle à long terme.
Type de roulement : roulement à billes à gorge profonde, structure simple, faible coût de maintenance.
Ce LZ5710N est un module commun plug-and-play léger, de faible consommation, conçu pour les applications à charge légère. Ses principaux avantages incluent : un couple nominal de 3 Nm, un faible jeu de seulement 7 minutes d'arc, un contrôle piloté par FOC, une communication CAN et deux encodeurs magnétiques. Il convient parfaitement comme effecteur final, articulation du poignet ou de la cheville pour les exosquelettes ou les robots collaboratifs, et est également parfait pour le développement rapide de petits robots éducatifs et de recherche.
| Modèle | LZ4610N Non creux | LZ4605N Non creux | LZ5710N Non creux | LZ5740N Non creux | LZ5736N Non creux | LZ807.75N Non creux | LZ8025CN Non creux | LZ10028CH Arbre creux | LZ12028CH Arbre creux |
|---|---|---|---|---|---|---|---|---|---|
| Type de réducteur | Planétaire | Planétaire | Planétaire | Planétaire | Planétaire | Planétaire | Planétaire | Planétaire | Planétaire |
| Méthode d'entraînement et de contrôle | FOC | FOC | FOC | FOC | FOC | FOC | FOC | FOC | FOC |
| Dimensions Diamètre × Hauteur (mm) | Φ46×38 | Φ46×38 | Φ57 × 46 | Φ57×60 | Φ57 × 70 | Φ80 × 47 | Φ80 × 60,5 | Φ100×68 | Φ120 × 80 |
| Rapport de démultiplication | 10 | 5 | 10 | 40 | 36 | 7h75 | 25 | 28 | 28 |
| Couple nominal (N・m) | 0,85 Nm | 0,4 Nm | 3,4 Nm | 12 Nm | 29Nm | 7,75 Nm | 27 Nm | 67,5 Nm | 126Nm |
| couple maximal (N・m) | 2,55 Nm | 1,2 Nm | 10,2 Nm | 36 Nm | 80 Nm | 23,2 Nm | 81 Nm | 200 Nm | 378 Nm |
| Encodeur magnétique | Double encodeur | Double encodeur | Double encodeur | Double encodeur | Double encodeur | Double encodeur | Double encodeur | Double encodeur | Double encodeur |
| puissance nominale (W) | 83 | 30 | 94 | 94 | 300 | 400 | 380 | 733 | 1570 |
| Tension nominale (V) | DC48V | DC48V | DC48V | DC48V | DC48V | DC48V | DC48V | DC48V | DC48V |
| Mode de communication | CAN/CANFD | CAN/CANFD | CAN/CANFD | CAN/CANFD | CAN/CANFD | CAN/CANFD | CAN/CANFD | CANFD/Éther CAT | CANFD/Éther CAT |
| Plage de température de fonctionnement (°C) | -20~60°C | -20~60°C | -20~60°C | -20~60°C | -20~60°C | -20~70°C | -20~70°C | -20~80°C | -20~80°C |
| Classe d'isolation | Classe B | Classe B | Classe B | Classe B | Classe B | Classe B | Classe B | Classe B | Classe B |
| Vitesse à vide (tr/min) | 110 | 220 | 210 | 112 | 130 | 645 | 156 | 143 | 140 |
| Vitesse nominale (tr/min) | 80 | 160 | 140 | 80 | 100 | 516 | 120 | 110 | 107 |
| Courant nominal (Apk) | 1.3 | 4.5 | 3 | 6 | 8 | 10.4 | 10.7 | 22 | 41,6 |
| Courant de pointe (Apk) | 3.8 | 13.5 | 9 | 9 | 16 | 20,8 | 30 | 66 | 83.2 |
| Jeu (arcmin) | ≤7arcmin | ≤7arcmin | ≤7arcmin | ≤1arcmin | ≤1arcmin | ≤1arcmin | ≤1arcmin | ≤1arcmin | ≤1arcmin |
| Constante de contre-EMF | 1,54 V/tr/min | 1,54 V/tr/min | 7,1 V/tr/min | 7,1 V/tr/min | 7,52 V/tr/min | 0,1528 Vs/rad | 7,45 Vrms/tr/min | 9 Vrms/krpm | 8 V/tr/min |
| Constante de couple | 0,025 Nm/A | 0,025 Nm/A | 0,1 Nm/A | 0,1 Nm/A | 0,124 Nm/A | 0,09143Nm/A | 0,15 Nm/A | 0,15 Nm/A | 0,12 Nm/A |
| Nombre d'étapes | 10 | 10 | 28 | 28 | 28 | 28 | 28 | 42 | 42 |
| Connexion de la bobine | Connexion étoile | Connexion étoile | Connexion étoile | Connexion étoile | Connexion étoile | Connexion étoile | Connexion étoile | Connexion Delta | Connexion Delta |
| Type de roulement | Roulement à billes | Roulement à billes | Roulement à billes | Roulement à billes | Roulement à billes | Roulements à rouleaux croisés | Roulements à rouleaux croisés | Roulements à rouleaux croisés | Roulements à rouleaux croisés |
| Bruit de travail (dB) | ≤55 | ≤55 | ≤55 | ≤58 | ≤60 | ≤65 | ≤65 | ≤65 | ≤70 |
| Poids (g) | 150 | 150 | 300 | 360 | 450 | 430 | 850 | 1550 | 2270 |
| Nombre de phases | 3 | 3 | 3 | 3 | 3 | 3 | 3 | 3 | 3 |

